《功能材料与器件学报》

理化所在液态金属打造柔性逻辑门器件及计算执
来源:功能材料与器件学报 【在线投稿】 栏目:综合新闻 时间:2021-07-09近年来,柔性运动机械因其交互友好、通用性强、应用领域广泛而受到业界的关注。然而,由于此类装置基于柔性体结构变形的运动机制,不同于传统运动理论指导下的刚体机器的运动行为,实现对柔性物体的有效便捷控制是一个挑战。在各种尝试中,依靠智能柔性材料的特定响应变化,专注于控制系统的开发是很有前景的策略。此类材料可以根据其响应变化的特性进行预编程,甚至可以擦除/重新编程。 ,从而达到更好的灵活机动性,但新材料的开发和精细化控制并不容易。如果考虑将理论上成熟的模拟或数字控制范式用于柔性结构,则可以利用现有的许多结果在控制原理和解决方案方面获得有力的帮助;然而,刚性电子元件和柔性结构不一定能够完美兼容,在大规模使用的情况下,可能会出现新的适应性问题。因此,如果能从硬件上对传统的控制元件进行创新,获得一个“软”的控制单元,并利用成熟的相关控制理论,有望实现人们更好地控制柔性机械的愿景。
近日,中科院理化所液态金属与低温生物学研究中心提出并确认了一种新型柔性逻辑门器件(AND、OR、NOT、NAND、NOR)液态金属液滴,计算单元的理论和技术方法,因此控制全柔性机器有望改变传统的柔性或刚性智能设备。相关研究成果发表在Advanced Intelligent Systems 上。
研究系统展示了液态金属柔性逻辑单元的设计思路,设计了两种基本逻辑单元。其原理是通过控制开关电压的大小,操纵流道内液态金属液滴的运动和变形来实现输出电路的通断,使器件具有“开-关”的二元逻辑特性。 ”。基于该逻辑单元,可以制备一系列液体逻辑门结构,实现更加多样化的逻辑运算和电信号输出,从而拓宽在液体逻辑控制领域的应用前景。此外,设计和制造柔性逻辑器件的最终目标之一是将其充分应用于柔性机器人的控制,从而实现各种特定的功能和行为。为了论证这方面的应用,本研究利用LMS搭建了一个双向控制单元,实现对气压累积的计算和控制,从而为气动夹爪提供不同的输入压力,从而实现了柔性结构在四个宏观形态上灵活变化。
硕士生李冬冬和博士生刘天英为论文的共同第一作者,刘静研究员为论文的通讯作者。研究工作得到国家自然科学重点基金和中国科学院前沿科学重点研究计划的支持。
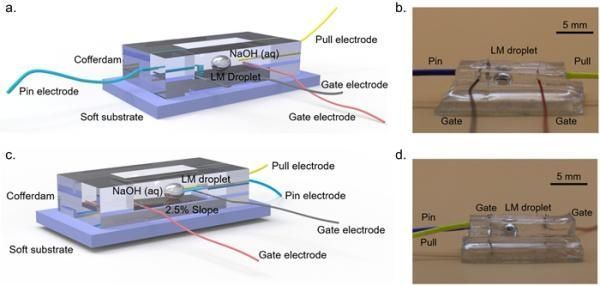
图 1. 液态金属逻辑器件的结构设计和实物图
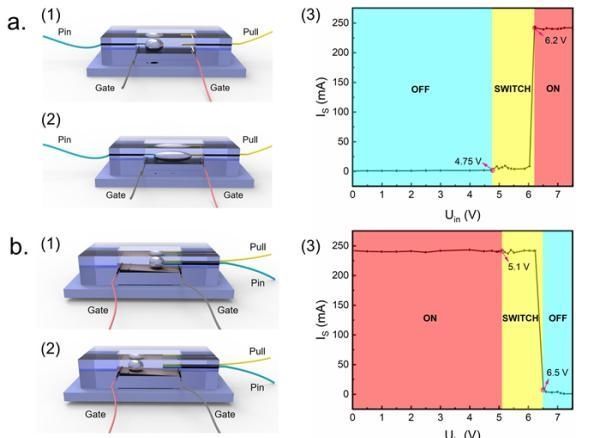
图2液态金属逻辑器件的工作原理及响应特性曲线
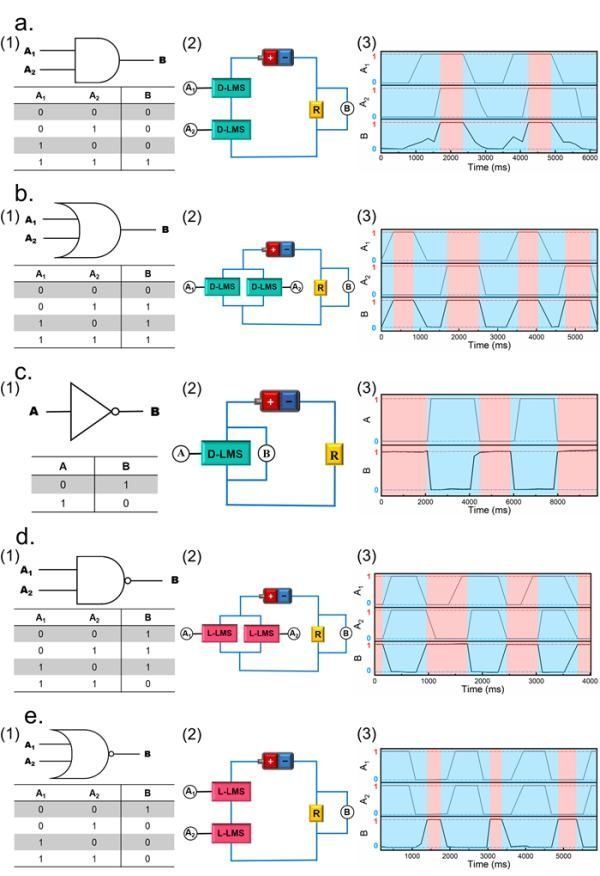
图 3. 可基于液态金属逻辑器件实现的多种逻辑门结构
[来源:理化所]
免责声明:转载本文是为了传达更多信息。若来源标注有误或侵犯您的合法权益,请持权属证明与本站联系,我们将及时更正、删除,谢谢。电子邮件地址?/p>